
Jan Prokaj, Ph.D.
Founder
- Bibliography sites:




Using 3D Scene Structure to Improve Tracking
Problem
- Aerial imagery collected over urban areas contains many occlusions for vehicles
- Current tracking algorithms cannot track vehicles through such occlusions due to weak object appearance and complexity of motion prediction over long period
Approach
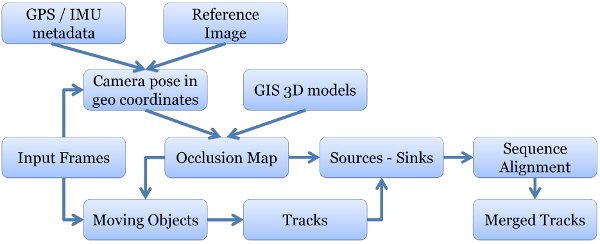
- Use known 3D scene structure to estimate a dynamic occlusion map: binary map, which indicates what regions of the image are occluders of moving objects; dynamic due to camera motion
- Cluster track initiations and terminations near an occlusion map to find sources and sinks
- Find corresponding source-sink pairs using the Hungarian algorithm
- Match a sequence of tracks at the sink with a sequence of tracks at the source using dynamic programming
- Merge the matched tracks
Results
| Proposed Algorithm | Hungarian Algorithm | |
| Correctly Linked | 58% | 42% |
| Incorrectly Linked | 3.4% | 5.8% |
Data
- Database of 3D models (93 models, 40.5 MiB)
- Sequences used in experiments (83.9 MB)
- Updated occlusion maps (8.9 MB)
Code
- Executables (occlusion map generation)
- Executables (track linking) (200 MB)
- Example output (track linking) (1.93 GB)
Reference
J. Prokaj , G. Medioni. Using 3D Scene Structure to Improve Tracking. In IEEE Conference on Computer Vision and Pattern Recognition , pages 1337-1344, 2011.